|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
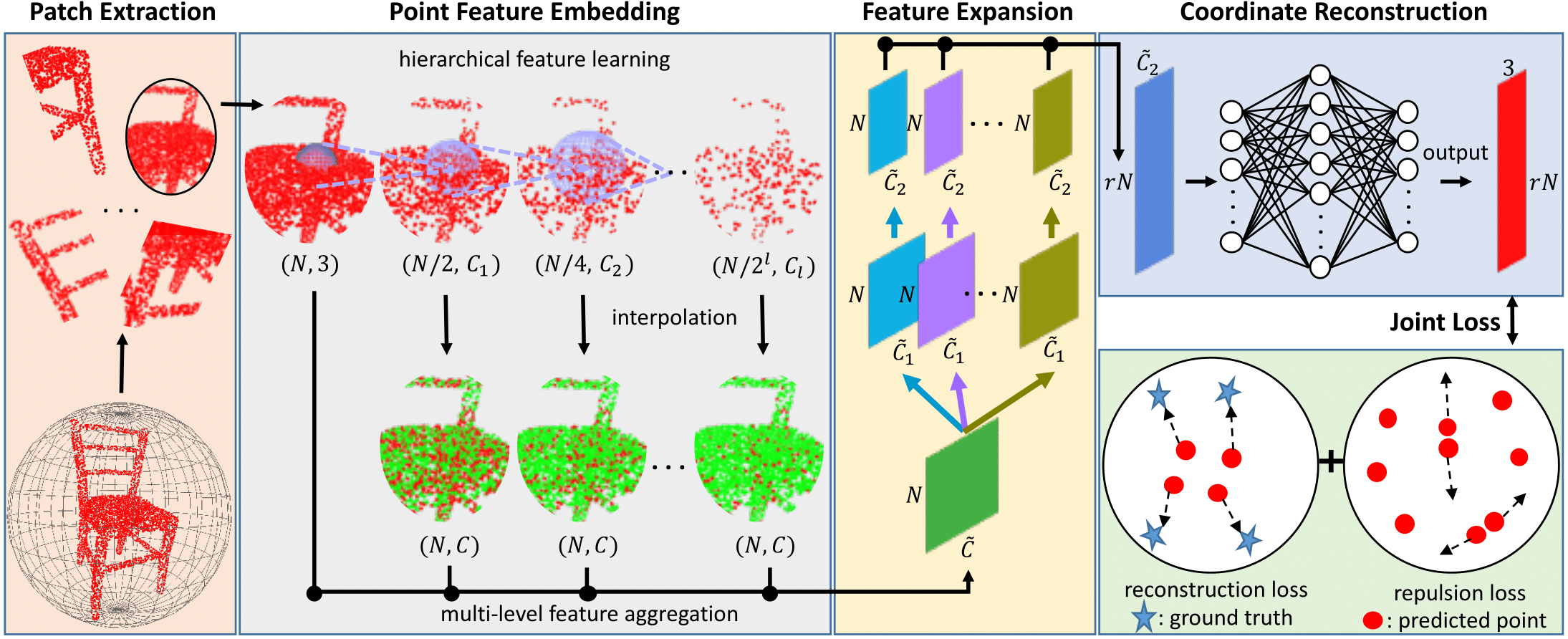 |
Architecture of PU-Net. |
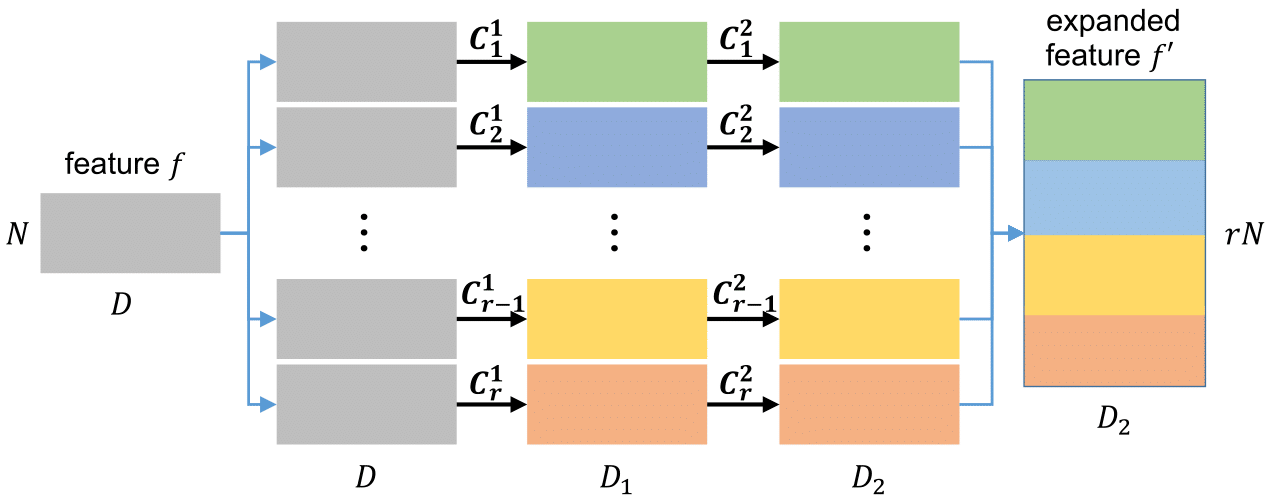 |
Architecture of Feature Expansion. |
 |
Lequan Yu, Xianzhi Li, Chi-Wing Fu, Daniel Cohen-Or, Pheng-Ann Heng. EC-Net: an Edge-aware Point set Consolidation Network. In CVPR, 2018. [Paper] [supp] [poster] |
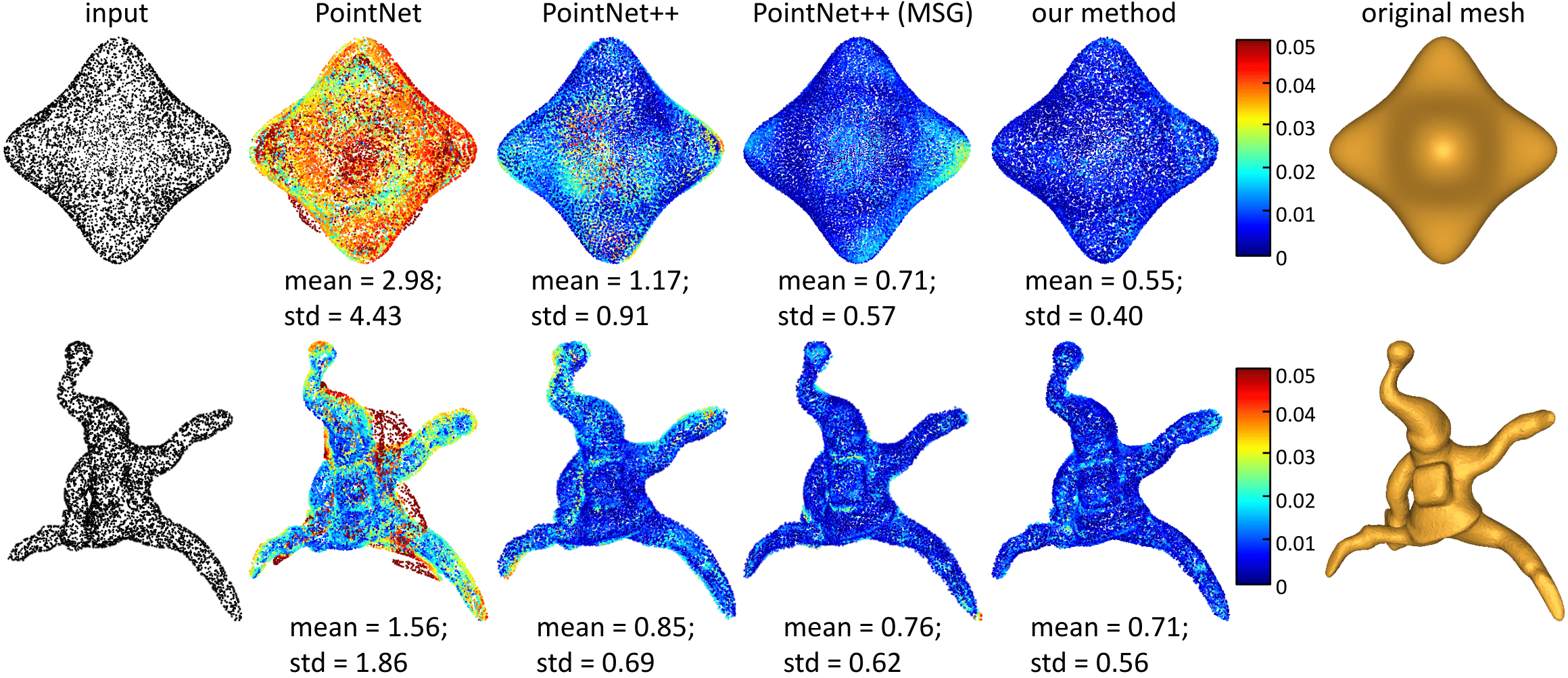 |
Visual comparison of deviation. The colors on points reveal the surface distance errors. |
|
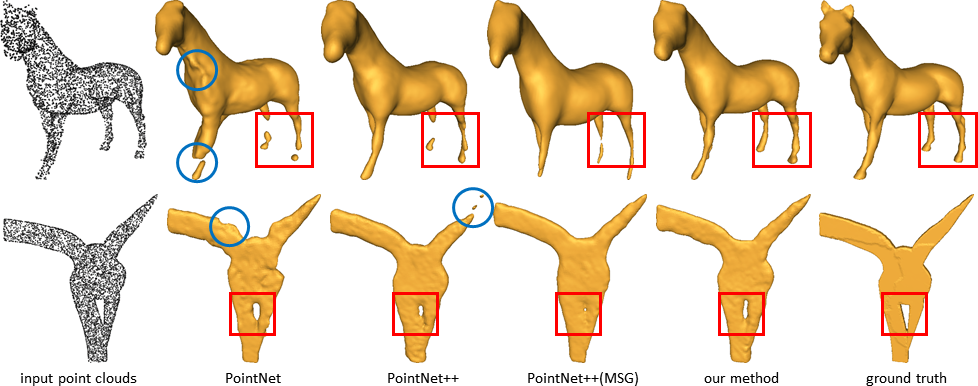
Surface reconstruction results from the upsampled point clouds. |
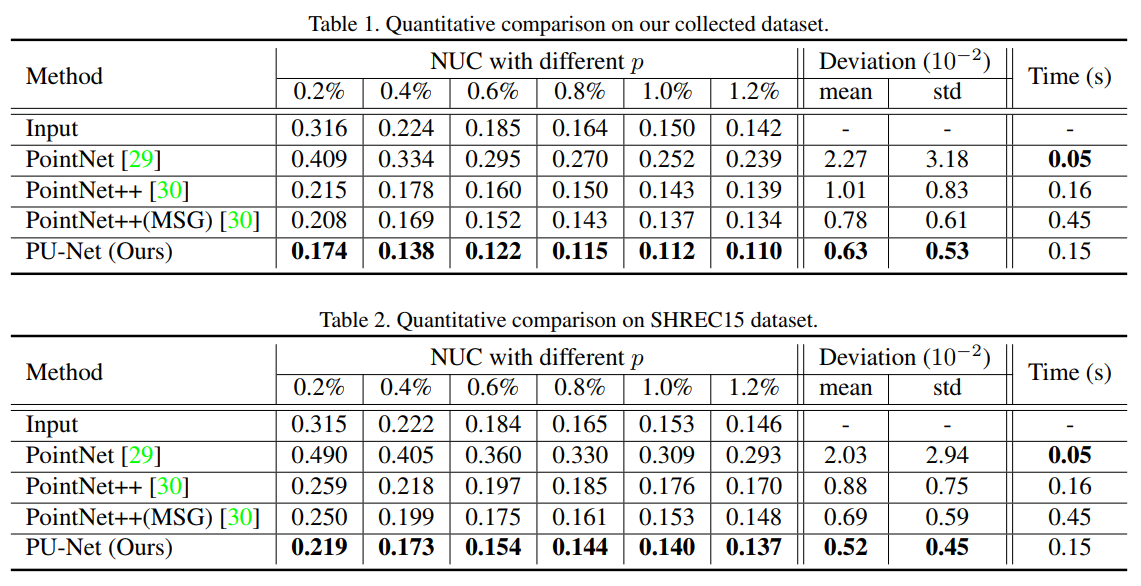 |
Quantitative comparison on testing dataset. |
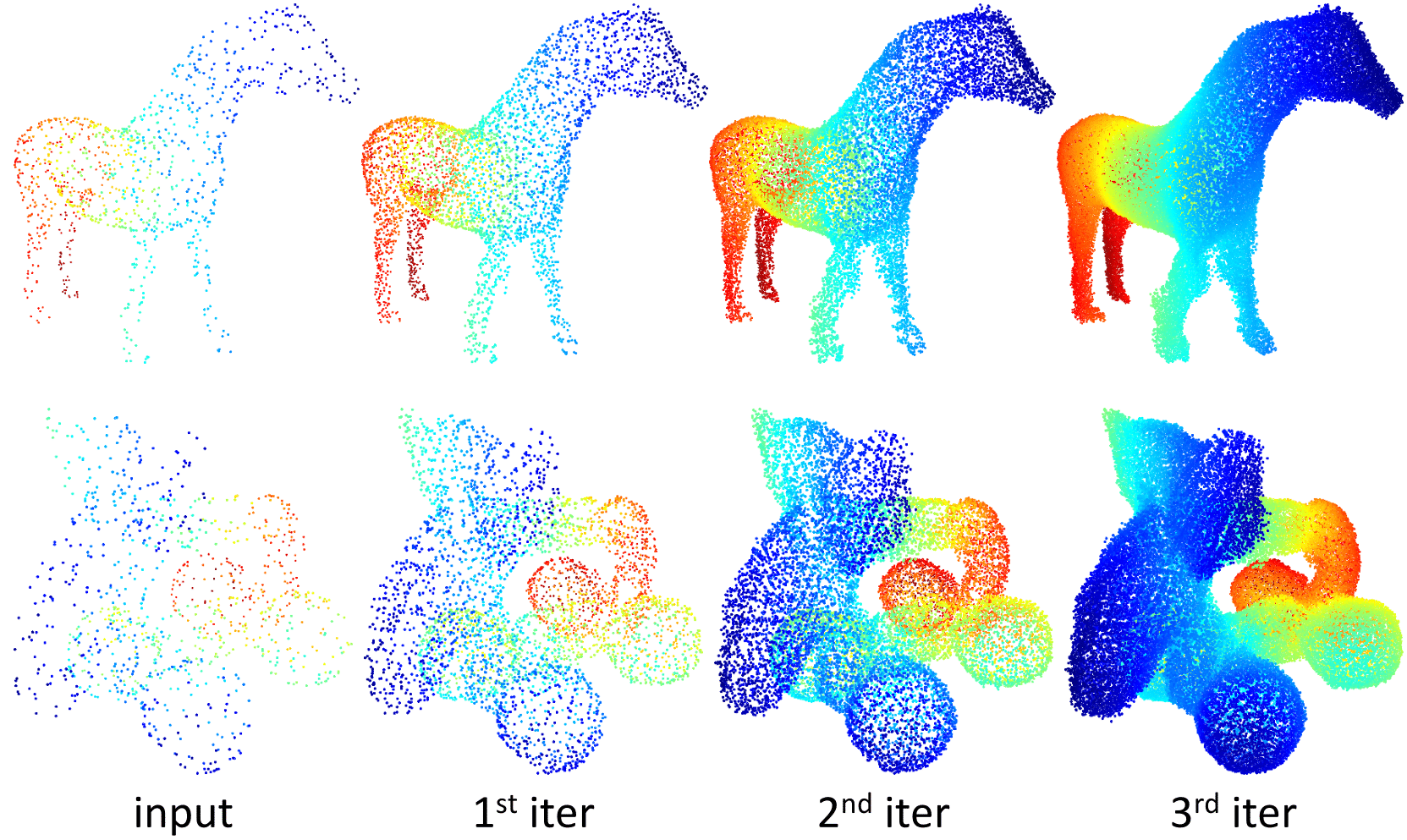 |
Results of iterative upsampling. |
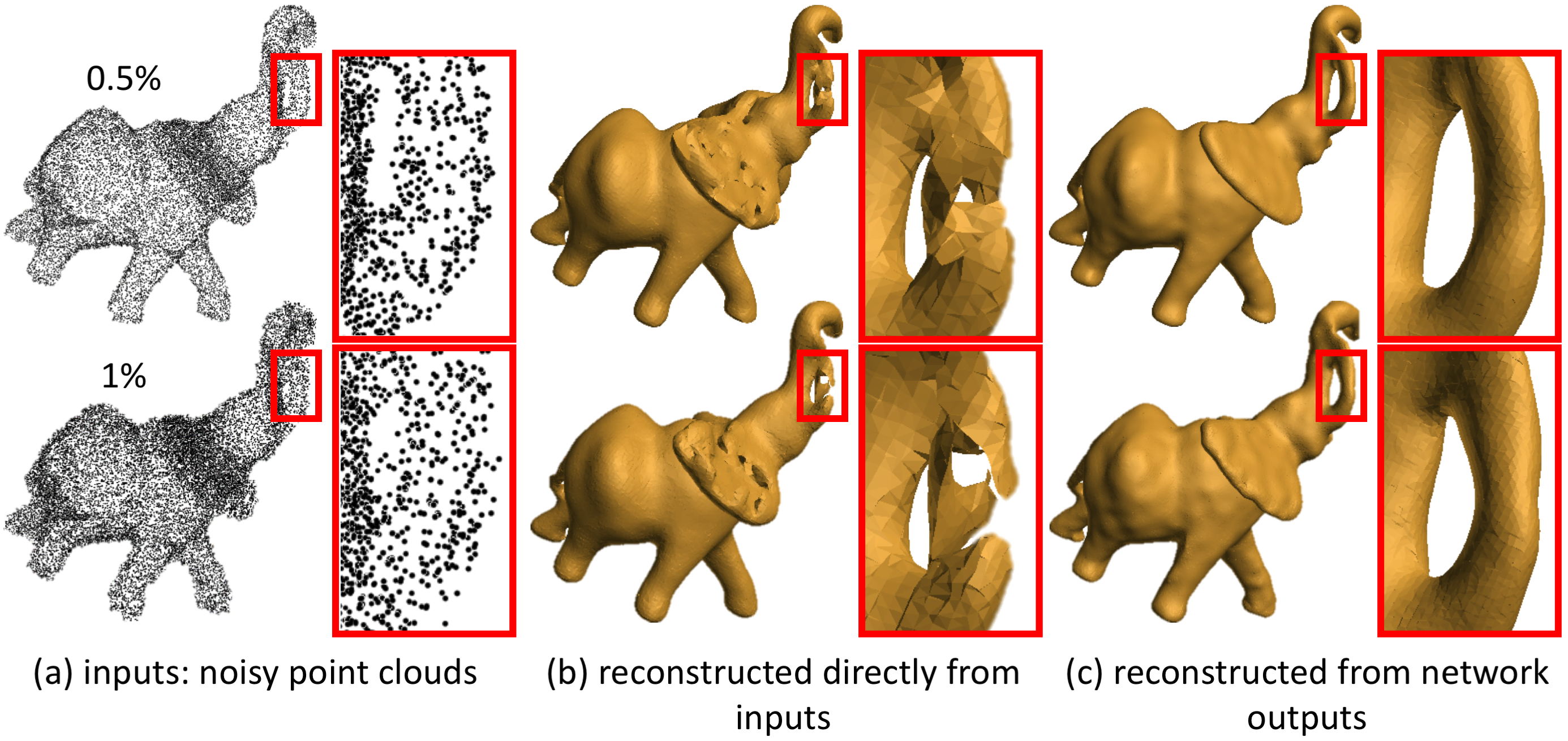 |
Surface reconstruction results from noisy input points. |
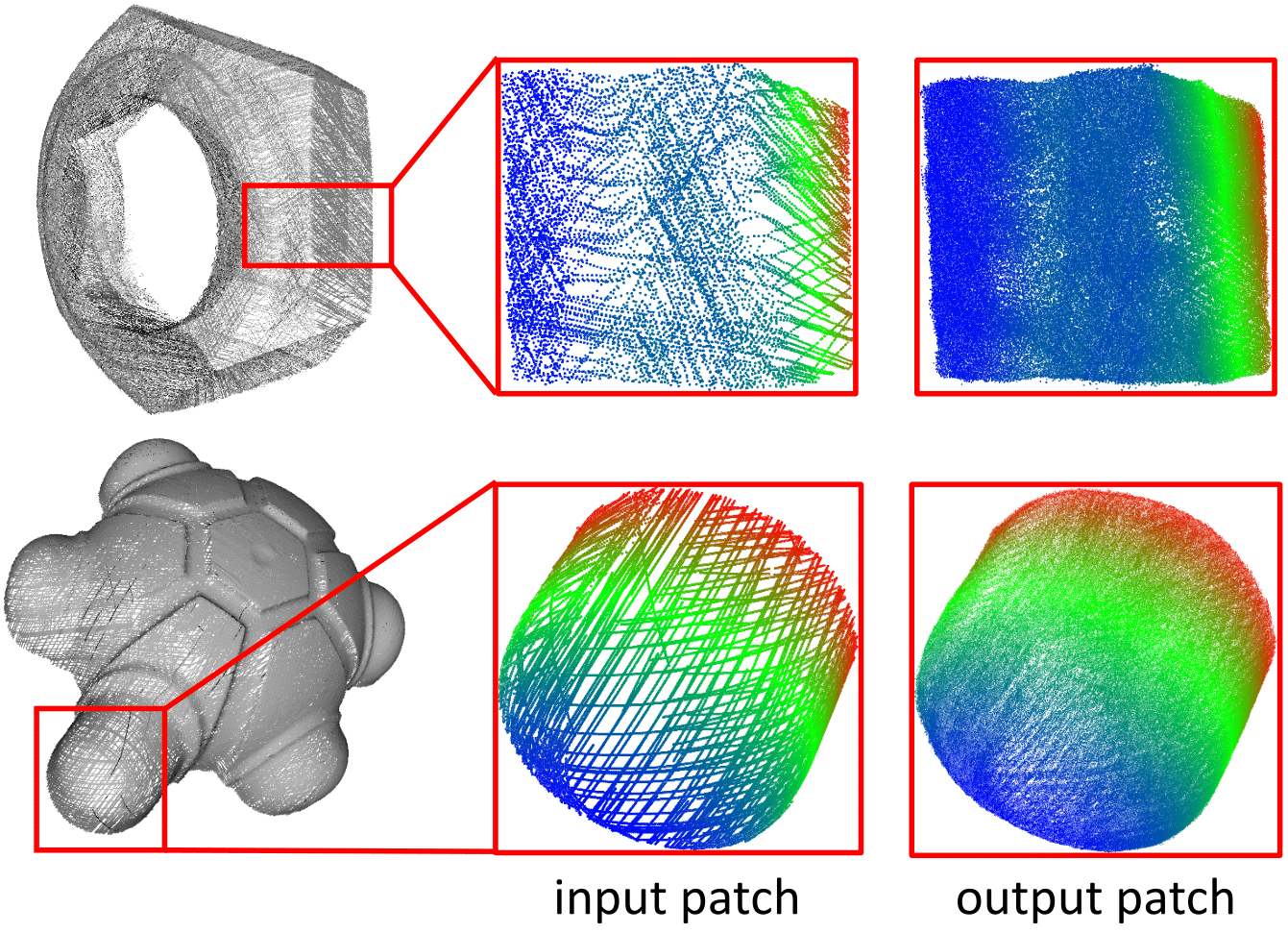 |
Results on real-scanned point clouds. |
Acknowledgements |